Contents
泊松重建 (Possion Reconstruction)
Reconstructing 3D surfaces from point samples
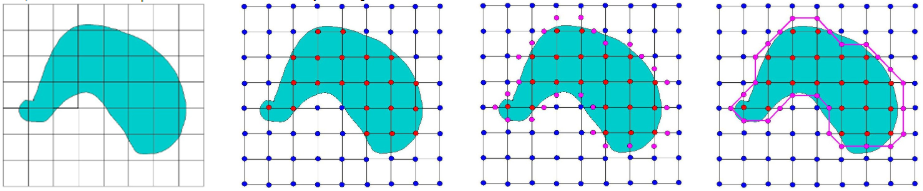
三维指示函数拟合
输入:有法向量的点集\(S\)(有向点云)
样本点 \(s\in{S}\) 位于未知模型 \(M\) 的表面 \(∂M\) 附in近,且必须包含两个属性: \(s.p\)(坐标)和 \(s.\overrightarrow{N}\)(朝内的法向)。
输出:指示函数(indicator function)\(\chi\),用于确定表里